2024年03期 無人機
瀏覽訂閱電子報
▎國科會工程處訊息
▎國科會工程處「無人機關鍵技術前瞻研發畫」簡介
資料來源:國科會工程處計畫徵求公告

無人機(Unmanned aerial vehicle, UAV)具有高機動性、低成本及快速產製等特性,已普遍導入各式應用領域,如災難搜索、大範圍巡邏、航拍測繪、科研遙測、農作生長調查和噴藥施肥等,亦可取代人類進入高危險地區或執行特定國防任務。然而我國現今仍缺乏相關無人機關鍵技術。
臺灣具備電子、電機和機械零組件完整產業鏈等優勢,國科會工程處之「無人機關鍵技術前瞻研發計畫」整合學術研究動能,建構無人機前瞻技術自主研發能力,強化國內無人機資通訊安全及技術成熟度,提升臺灣國防自主能量。
此計畫希冀透過推動研發無人機關鍵技術及功能模組,滿足臺灣國防應用需求;並透過創新、自主可行性的相關量化指標及驗測,使計畫研究成果得以強化研發技術價值,降低我國無人機應用之資通訊安全疑慮。
此計畫為任務導向型計畫,並鼓勵產學合作,研究重點包括:固定翼無人機群飛技術、自主定位之無人機群飛技術、無人載具異質協同系統技術、無人機群建構之通信中繼網絡技術、多機快速地面物件辨識與3D地形圖建立技術、無人機反制技術及其他無人機前瞻系統技術。
▎國際趨勢情報
▎HHLA Sky GmBH–德國開啟無人機送貨新階段
資料來源:sUAS News
網址:https://www.suasnews.com/2024/02/hhla-sky-gmbh-a-new-phase-of-drone-deliveries-unlocked-in-germany/

2024年2月21日,第一架超視距(Beyond Visual Line of Sight, BVLOS)自動無人機從德國呂登沙伊德(Lüdenscheid)起飛,並獲得聯邦航空辦公室SAIL III的常規營運批准。
這標誌著使用自動化無人機進行交付的重大進步,使其能夠繞過傳統的交通障礙,直接向公司交付工業機器的關鍵小零件。
這一里程碑的實現得益於無人機服務營運商Koerschulte、無人機製造商Third Element Aviation和行動機器人管理開發商HHLA Sky之間的合作。
他們共同推出了貨運無人機的商業定期飛行業務,旨在提供快速、自動化的空中物流解決方案:Auriol。
HHLA Sky也提供用於超視距自動化操作的貨運無人機:X25。
Auriol是德國第一架商業定期貨運無人機,用於立即交付公司所需的重要零件。該貨運無人機的負載能力高達6.5公斤,最長飛行時間為45分鐘,最高時速為65公里/小時,也配備了安全降落傘。
Koerschulte的營運由綠色電力提供動力,並承諾在節省成本和時間方面提高效率。
該項目的一個獨特之處是無人機的操作模型。無人機不是傳統的每架無人機一名飛行員的設置,而是由Koerschulte服務提供商的遠端操作員進行監控,借助 HHLA Sky開發的整合控制中心,操作員僅在出現偏差時進行干預。
HHLA Sky整合控制中心為透過自動化有效管理和監控無人機操作提供了複雜的解決方案。
整合控制中心讓一名遠端飛行員能夠同時管理和控制多達12架無人機,總共可以同時控制100多架正在運作的無人機。
這只是歐洲自動化無人機送貨的開始。在呂登沙伊德啟動無人機送貨是德國聯邦航空辦公室首次成功批准的項目,但項目合作夥伴渴望擴大規模,計劃建造更多運輸無人機,並延伸橫跨德國和歐洲的航線。
這對於產業來說是一個里程碑。它展示了無人機技術在改變最後一哩物流方面的潛力。
▎無人機技術∣國科會工程處專題研究計畫
▎於行動式裝置融合無人機視訊及穿戴式感測資訊應用於即時游泳者安全監控及泳姿辨識設計
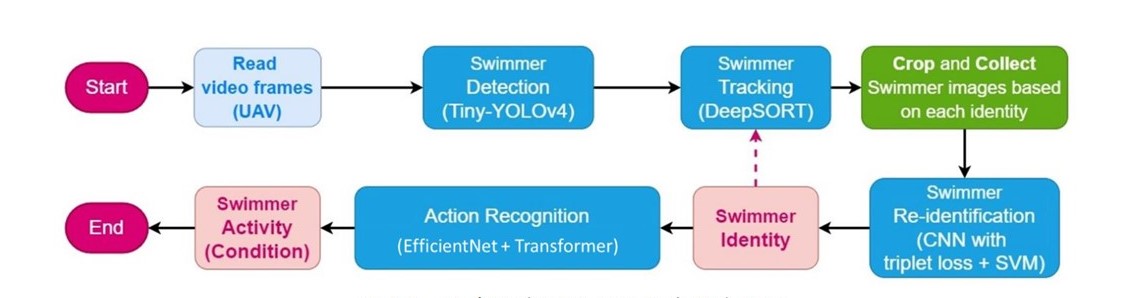
泳者泳姿辨識及溺水偵測流程圖
簡介:此計畫著重在融合深度學習(Deep Learning)、基礎的電腦視覺(Computer Vision)及穿戴式裝置測量資訊及無人機技術,達成即時的泳者安全監控與泳姿辨識目標,期為人類提供更完善的游泳安全科技。若能完成此即時泳者安全監控及泳姿辨識系統將對游泳安全、預防溺水、縮短救援時間、節省專業人力監控與專業人士互補及訓練泳者均有幫助。
主要突破貢獻包括:1)整合軟體模組成一個APP於行動式裝置上,包含Tiny YOLOv3/ENet-CNN、DJI SDK、GPS、智慧手錶(穿戴式裝置)、Beacon與無人機IP資訊;2)提出雙向事件驅動融合方法(Bidirectional Event Trigger Fusion Approach)整合無人機視訊及智慧手錶資料達成泳者安全監控;3)提出對稱式融合方法(Symmetry Fusion Approach)整合無人機視訊及智慧手錶資料判斷泳姿;4)建構無人機及泳者的定位技術;5)無人機群協同合作,整合上述突破點技術達成即時游泳者安全監控及泳姿辨識之智慧自動飛行系統,並完成一個前瞻協同合作系統,預期本系統將用來預防溺水及救援事件,讓生命更加有保障。
▎AIOT無人機救難隊: 山難救援

多無人機搜救平台與低軌道衛星通訊
簡介:本計畫將一對一控制無人機介面升級為單一帳號可控制多台無人機之一對多介面。其次,結合Google Earth,可在虛擬實境中重現真實世界的地形地貌,模擬搜救工作。此外,同步現實與虛擬世界進行Hardware-in-the-Loop (HITL)無人機測試。
為了解決山區許多地方沒有4G/5G訊號的問題,計畫團隊更進一步與臺灣太空中心TASA合作,將無人機搜救平台與其低軌衛星通訊車做系統整合,開發可在車上遠端視訊遙控多台無人機進行搜救任務之系統。本計畫成果可以為未來整合衛星遙控無人機群的功能鋪路。
▎無人機隊智慧雲端服務共享平台
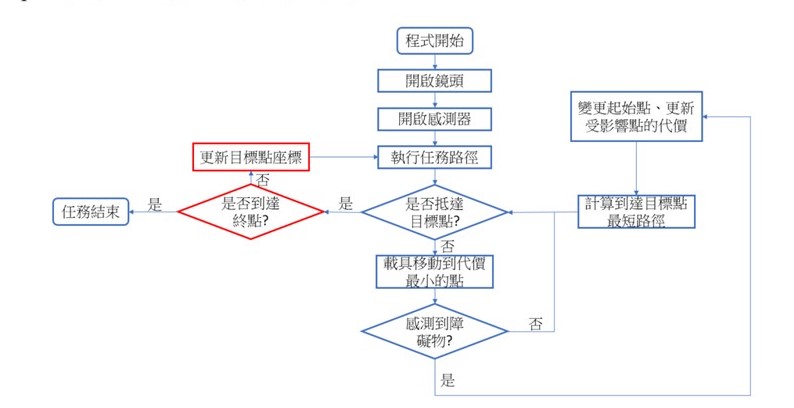
先行者無人機任務流程
簡介:本計畫旨在建立一個可應用於無人機隊任務之雲端服務平台,如同Google Map提供使用者交通路況資訊一般,藉由服務平台來讓提供物流無人機得到完整且即時的空間及地理資訊,提高在陌生環境下的飛行安全以及執行效率。
在地理資訊的獲得方面,研究中使用六軸無人機搭配雷射測距和視訊鏡頭進行感知,並使用Jetson Xavier NX實現YOLOv5預訓練模型進行物體檢測。該系統可以自主感知周圍的環境,還建立了障礙物資訊通報系統使得不同機群間能進行障礙物資訊的流通。
基於SaaS平台有拓展性及連接便利的特性,本研究也在載具端(Edge)設計一個資料轉譯模組,此模組將擷取MAVLink眾多資料中欲共享至雲端的資訊轉譯為MQTT封包再與雲端共享,可降低無人機與雲端共享所需要的資訊頻寬。未來物流無人機可透過此一創新服務平台來提升配送效率,及降低載具在配送過程中的飛航風險。此案中所發展之機隊群控與訊息共享管理技術已衍生應用至國內無人機公司。
▎以無人載具探討應用於水環境監測採樣之適法性研究
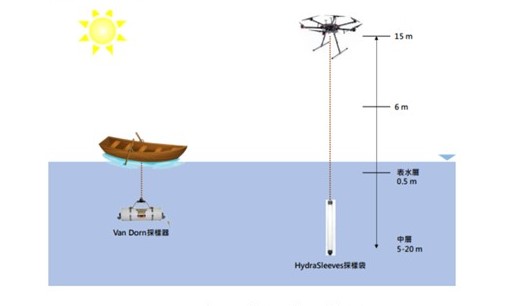
無人機採樣示意圖
簡介:相較於傳統的人工、船舶水質採樣,利用無人機輔助水質採樣作業具有許多潛在優勢,包括成本效益高、節省時間、降低採樣風險,並能克服地形限制;但無人機是否能取得足夠的水樣體積、採樣方法是否符合規定、機體是否符合資安規定、採樣水質是否具有差異性等問題尚未解決,因此無人機是否能適用於水質採樣仍然具有疑慮。
為提供關鍵資訊給環境主管機關參考以修訂相關法規(使無人機合法地成為環境水質監測採樣的工具)、建立最佳化無人機水質採樣技術與研發適合無人機之水質採樣裝置,本研究使用國產無人直升機ALPASII與自製輕量化採樣器,在符合國內陸製無人機法規限制、河川湖泊採樣規定及能夠取得與船舶採樣同體積水樣的前提下與標準船舶採樣水質相比,探討無人機採樣方法的水質一致性與再現性。
本研究在嘉義縣的仁義潭水庫、曾文水庫和蘭潭水庫進行了採樣實驗。選擇了每座水庫的三個採樣點位,包括入流口、出流口和湖心,以確保取得全面且代表性的水樣。在採樣過程中,本研究同時使用無人機和船舶進行採樣,並對水質項目進行分析,以評估無人機採樣法對各項水質的影響。
在評估無人機產生的下洗流對表層水影響的實驗中,本研究使用離水高度6公尺與15公尺進行無人機採樣作業,並與船舶採樣進行比較,採樣結果得出無人機於此兩種採樣高度採樣之水質與船舶採樣具有一致性,因此可推斷在這兩個採樣高度下並不會對水質產生顯著影響。
在評估無人機採取中、深層水可行性實驗中,本實驗先測量各水庫之水深,並使用無人機與船舶同時採集該深度之水樣,採樣結果得出使用無人機與船舶採取的水庫中、深層水具有一致性,因此可推斷使用無人機採集湖庫中的中、深層水是具有可行性的。
在採樣再現性評估的實驗中,本研究透過三重複採樣表層水的方式計算其變異係數,以評估再現性,採樣結果得出無人機採樣與船舶採樣的變異係數具有一致性,除了船舶採樣的pH值會略高於無人機,但仍在合理範圍內,因此可推斷無人機採樣與船舶採樣具有相同且良好的再現性。
在自製輕量化採水袋的測試實驗中,本研究先使用符合法規規定的Kemmerer採樣器和自製輕量化採水袋同時採集水樣,結果得出兩者的水質採樣數據具有一致性。本研究接著使用國外商品化的採樣袋HydraSleeves與自製輕量化採樣袋進行再現性比較,結果為自製採樣袋具有更優良的採樣再現性,即代表自製採樣袋能獲取具有代表性且符合採樣需求的水體樣本。
在採樣效率分析的實驗測試中,根據採樣經驗可得出,比起船舶採樣,使用無人機採樣能減少7成以上的採樣時間。因此在使用無人機輔助水質採樣的情況下,能大幅減少採樣的時間成本。
綜合以上無人機採樣之優點,與其採樣之水質和傳統船舶採樣無明顯差異之情況下,無人機採樣法具有適法性與不錯的未來性,未來應能更多的應用於水體監測的情況。
▎產業與觀光鐵道運輸之無人機自動巡航智慧型安全監視系統開發
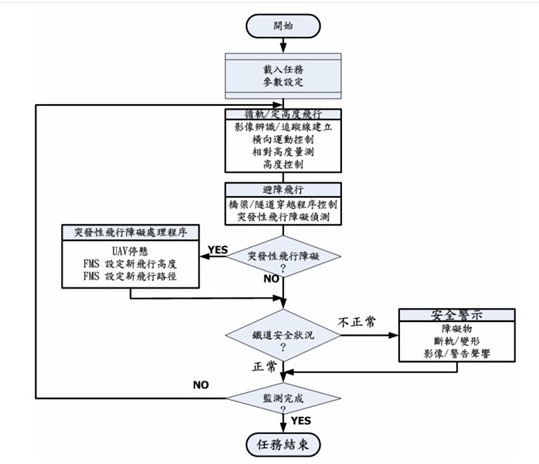
任務執行流程圖
簡介:本計畫成果已獲得中華民國發明專利「智慧型無人機鐵道監控系統及方法」(I800137)。
國際運輸安全趨勢已由被動式轉為主動式,本計畫因而提出「產業與觀光鐵道運輸之無人機自動巡航智慧型安全監視系統開發」,此系統功能包括:(1)鐵軌辨識循軌飛行、(2)人工智慧鐵路安全辨識、(3)地形追隨高度控制,和(4) 5G物聯網資料傳輸等四大功能,可以進行觀光、產業鐵道之安全預警監測;應用例(1)—阿里山林業鐵路為熱門觀光路線-溪阿縱走,此系統將可對行走在鐵道上的遊客進行預警與廣播排除,也可以對於落石傾倒樹木進行預警。應用例(2)—虎尾糖場產業鐵路,有些路段為公路與鐵道共構;所以此系統將可針對鐵道上障礙,進行監測與安全預警;此系統研發完成之後,也可以推廣到東部鐵路幹線鐵道預警監測。
無人飛行載具在國內外已有許多研究,無人飛行載具可以提供資源探勘、航拍、農業、救災等,使用無人飛行載具、掛載的感測元件與攝像鏡頭,監控者可以有效率的監控鐵路的即時狀況,降低鐵路事故發生率。本計畫利用5G通訊技術傳送感測器資料、即時影像和飛控訊號,使監控站能即時讀取和觀看無人飛行載具所回傳的資料,地面站也能利用5G訊號對飛行器進行視距外的飛行操控,不同於以往會受距離限制的RC控制器或Wifi通訊,只要在能接收5G訊號的範圍,皆能達到即時監控能力。另外光學雷達(Light Detection And Ranging: LiDAR)的運用日趨成熟;利用光達精確地量取飛行高度,使無人飛行載具在飛行於穩定的高度對鐵路做探測,並利用人工智慧技術辨識鐵路的異常狀況。監控站經由5G通訊系統接收異常通知時,並同時傳送異常訊號與位置資訊至臨近行駛中的火車駕駛員,監控人員可清楚鐵路的問題種類和位置,迅速做最適當的處置。



編輯出版:國家科學及技術委員會補助|工程科技推展中心
地址:701 台南市大學路一號 國立成功大學 自強校區 科技大樓三樓