

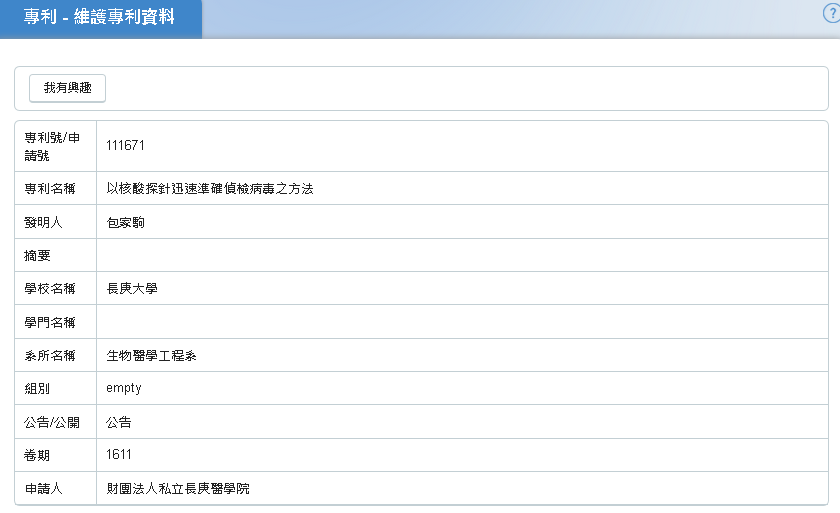





| 專利號/公開號 | 201708003 |
| 專利名稱 | 多輪驅動電動車之底盤系統整合架構及其控制方法 |
| 發明人 | 李綱 LI, KANG;王俊凱 W |
| 摘要 | 本發明在於提供一種能提高多輪驅動電動車之操控性與安全性的多輪驅動電動車之底盤系統整合架構及其控制方法。其技術手段:為該整合架構能配合具有車身動態感測系統的多輪驅動電動車,有效整合前輪主動轉向、差動驅動與差動煞車此三項底盤子系統功能,達成整合式底盤控制技術之應用;整合架構方面,包括有車輛動態控制單元、轉向控制系統、輪胎滑差控制系統、及底盤動力控制系統;控制方法方面,根據前輪主動轉向和差動驅動、差動煞車之間的關係,車輛動態控制單元能以緊密耦合控制架構、鬆散耦合控制架構以及非耦合控制架構等三種方式設置,以提高多輪驅動電動車之操控性與安全性。 |
| 學校名稱 | 國立臺灣大學 |
| 學門名稱 | |
| 系所名稱 | N |
| 組別 | empty |
| 公告/公開 | 公開 |
| 卷期 | 1505 |
| 申請人 | N |